这篇笔记主要记录Transformer
我理解主要有几个变化:
- 使用注意力机制代替 RNN 的递归状态传递(hidden state),从而摆脱时间步之间的串行依赖,实现并行计算。(Transformer 里完全不使用 RNN)
- 引入位置编码,使模型能够感知 token 的位置信息;正弦位置编码还具有便于学习相对位置关系的性质
- 注意力包含了自注意力和 Cross-Attention(交叉注意力),两者都是多头注意力
- 引入掩码机制,根据用途不同又分为填充掩码(Padding Mask)和因果掩码(Causal Mask)
1. Attention is All You Need
相比之前笔记《GPT 图解》笔记:Seq2Seq及点积注意力里的 Seq2Seq,Transformer 最大的变化就是不再需要任何循环神经网络结构,也就是代码里没有self.rnn = nn.RNN这一层了。
从功能角度,RNN 和 Attention 都是在解决建模序列中的上下文依赖关系的问题:如何让单个 token 不只知道自己,还知道上下文。
RNN 的思路是 把历史压缩进 hidden ,而 Attention 则是需要谁的信息, 就直接去读取谁。具体的:
- RNN 是通过隐藏状态的递归计算: The → animal → didn’t → cross → … → it ,对应: h1 → h2 → h3 → … → ht ,即一步步把信息传递过来。
- Transformer 则通过注意力机制解决: \( \text{softmax}\left(\frac{QK^T}{\sqrt{d_k}}\right)V \)
核心变化是:不再依赖 hidden state 逐步传递信息,而是利用 Attention 允许每个 token 根据需要动态聚合其它 token 的信息。从而更好地处理长距离依赖,并实现大规模并行计算。
2. Transformer 架构
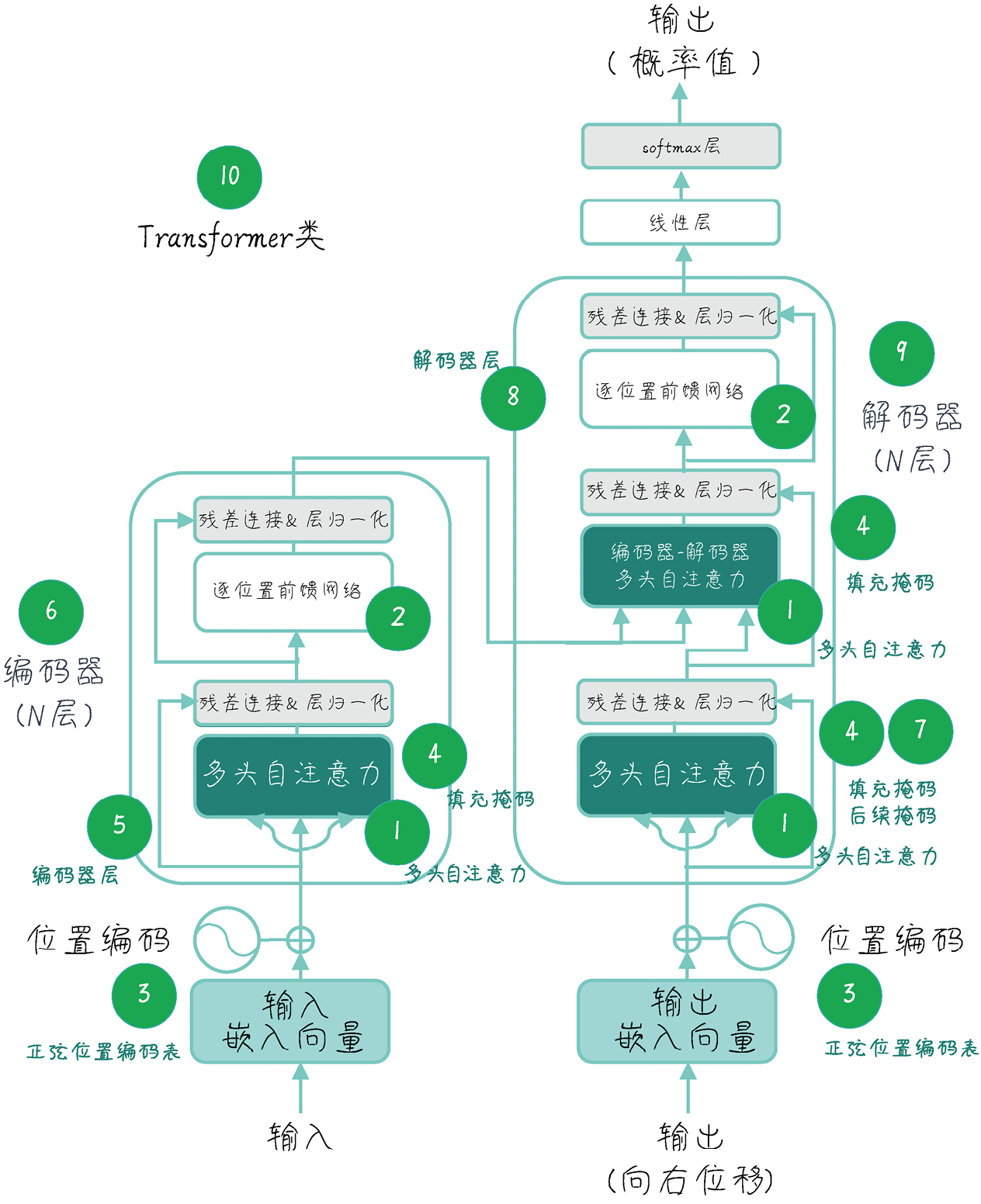
接下来介绍下其中新出现的一些名词,然后解析该架构。
3. Transformer-位置编码
位置编码在编码器、解码器都存在,位于生成输入向量之后。位置向量与输入向量相加,生成新的表示向量。
RNN 和 Transformer 都有 Embedding 这一层: embedding = nn.Embedding(vocab_size, hidden_size)
流程上也都是: token id → Embedding → token vector
RNN 是顺序计算(h1 → h2 → … → hn),因此计算过程天然包含顺序信息,不需要额外的位置编码。
Transformer 则做不到。
Self-Attention 可以建立 token 之间的两两关联关系(attention),但本身无法区分 token 的先后顺序。例如: “I love you” 和 “you love I”.
如果只看词向量集合,Self-Attention 本身并不知道谁在前谁在后。
Position Encoding 的作用是向模型显式提供位置信息,从而弥补 Self-Attention 本身缺乏顺序感知能力的问题。
具体的,位置编码本身并不会直接决定“谁关注谁”,它只是为每个 token 提供位置信息。真正的关注模式会在训练过程中由 Attention 的参数学习得到的。
例如,在大量语料中,模型可能经常看到类似 “The cat sat on the mat” 这样的结构。由于位置编码告诉模型 “cat” 和 “sat” 之间存在稳定的位置关系,而 Attention 又可以自由学习 token 之间的依赖,训练后模型往往会学到:在理解 “sat” 时,需要关注前面的主语 “cat”。
也就是说:位置编码提供“位置信息”,Attention + 参数学习决定“关注关系”。
那位置编码是什么?论文中采用的是正弦位置编码:
- 偶数维:\( PE(pos,2i)=\sin\left(\frac{pos}{10000^{2i/d_{model}}}\right) \)
- 奇数维:\( PE(pos,2i+1)=\cos\left(\frac{pos}{10000^{2i/d_{model}}}\right) \)
比如位置 100 的编码是:
PE(100) = [
sin(...), # 第0维
cos(...), # 第1维
sin(...), # 第2维
cos(...), # 第3维
sin(...), # 第4维
cos(...), # 第5维
]
即每个位置都会同时拥有 sin 和 cos 两部分信息,放在 embedding 的不同维度里。
为什么选择这个函数,我的理解是:
Transformer 需要学习的是 Q、K、V 等参数矩阵。 这些参数不应该依赖于某个具体位置,否则模型只能处理训练时见过的位置。例如训练时见过 pos=1000,如果参数与绝对位置绑定,那么推理时遇到 pos=1001 就无法很好泛化。
因此可以推导出对位置编码函数的要求:除了表示绝对位置外,还需要让模型容易学习“相对位置关系”。
正弦位置编码恰好具有这样一个性质:对于每个频率对 (sin, cos),PE(pos + k) 可以表示为 PE(pos) 的线性组合。
即存在一个仅依赖于 k 的变换矩阵,使得: PE(pos + k) = W(k) · PE(pos)
其中 W(k) 只依赖于相对偏移量 k,而不依赖于具体位置 pos。
因此对于 Attention 来说,相同的相对偏移量总能对应到相同的变换模式。训练过程中,模型就更容易学习到:
- 距离当前 token 2 个位置的词比较重要
- 距离当前 token 10 个位置的词不太重要
等相对位置规律。
也正因为学习的是相对位置规律,而不是某个固定位置,所以模型能够泛化到训练时未出现过的序列长度。
可能更简洁的理解:正弦编码既能表示绝对位置,又能通过线性变换表达相对位置关系。
4. Transformer-注意力
架构图中有两种注意力:
- 多头自注意力
- Cross-Attention(交叉注意力)
两种注意力最直接的区别:
- Self-Attention:Q、K、V都来自同一个地方(编码器中则来自编码器输入、解码器中则来自解码器输入)
- Cross-Attention:Q来自一个地方(解码器),K、V来自另一个地方(编码器)
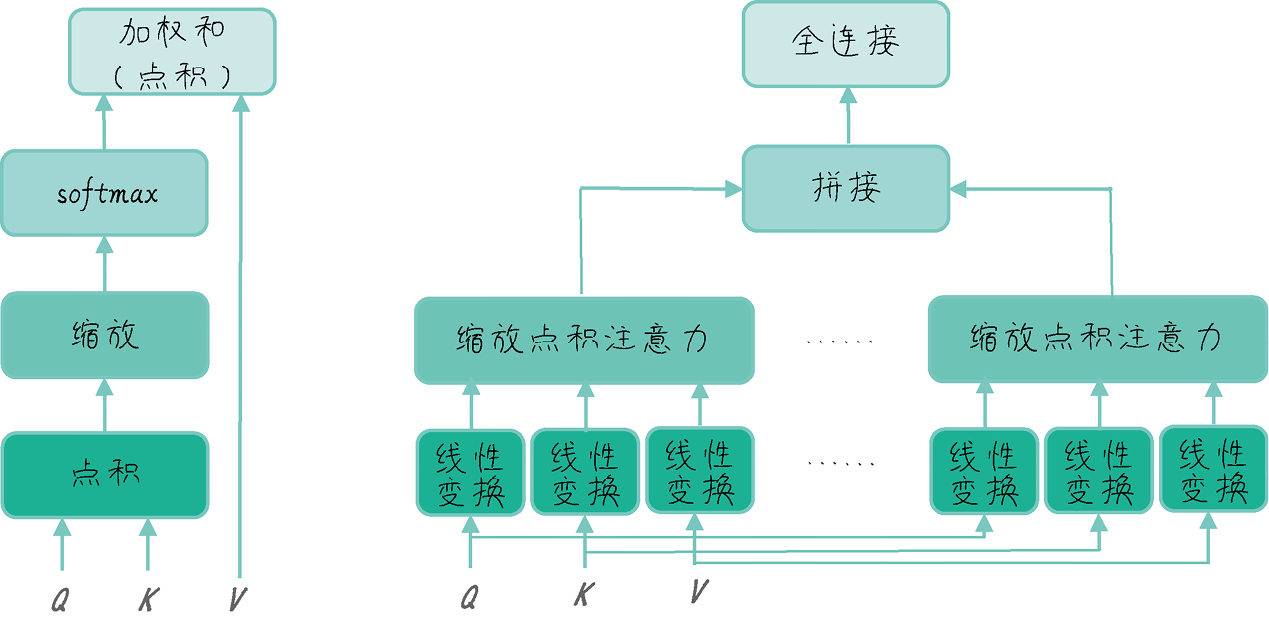
自注意力到多头注意力,主要是引入了多个子空间:
5. Transformer-Encoder
编码器由多个相同结构的层堆叠而成,每个层包含两个主要步骤:
- (多头自注意力 → 残差连接 & 层归一化)
- 掩码:使用 填充掩码(Padding Mask),忽略句子中的 [PAD] 占位符
- 输入:输入序列的词向量 + 位置编码的结合信息。
- (前馈神经网络(FFN) → 残差连接 & 层归一化)
- 作用:对自注意力层收集到的上下文信息进行非线性变换和特征提取,让模型学习更复杂的模式。
- 输入:经过第一步处理后的特征向量(已融合全局信息)。
- 输出:当前编码器层的最终表示,传递给下一编码器层。
源码可以在作者的 github 找到,这里就不照抄了。梳理 Encoder 流程图及形状变化:
flowchart TD
A["enc_inputs<br/>(B, S)<br/>Token ID"]
A
-- "nn.Embedding(vocab_size, d_model)" -->
B["token_embedding<br/>(B, S, D)"]
A
-- "Position Index<br/>1...S" -->
C["pos_indices<br/>(1, S)"]
C
-- "Sin/Cos Position Embedding" -->
D["position_embedding<br/>(1, S, D)"]
B
-- "+" --> E["Embedding Fusion<br/>(B, S, D)<br/>Token + Position"]
D
-- "+" --> E
A
-- "get_attn_pad_mask()" -->
F["enc_self_attn_mask<br/>(B, S, S)"]
subgraph Encoder Layers [Encoder Layer × N]
G["Layer Input<br/>(B, S, D)"]
G
--> H["Multi-Head Self Attention<br/>Q = K = V = Input"]
F
--> H
H
--> I["Add & Norm<br/>Residual Connection"]
I
--> J["Position-wise FFN<br/>D → d_ff → D"]
J
--> K["Add & Norm<br/>Residual Connection"]
K
--> L["Layer Output<br/>(B, S, D)"]
end
E
--> G
L
--> N["enc_outputs<br/>(B, S, D)<br/>Final Encoder Output"]
H
-. "attn_weights<br/>(B, n_heads, S, S)" .->
M["Attention Weights"]
流程:
nn.Embedding+ 位置编码生成新的向量表示- 增加位置编码,遮挡 enc_inputs 中的 padding 位置
- 输入首先经过线性投影得到 Q、K、V,然后通过多头自注意力计算上下文表示(context)和注意力权重(weights)。
- FFN 迭代: \( FFN(x) = W_2(ReLU(W_1x + b_1)) + b_2 \)。注意这一层跟 Attention 层的区别,Attention 层主要更新:W_Q、W_K、W_V、W_O(输入到 Q/K/V 空间的投影矩阵),FFN 层主要更新:W1、W2(以及对应 bias)。Attention 负责决定看谁,FFN 负责决定看到之后如何加工这些信息
再深入到 Multi-Head Self Attention ,这里由两部分组成:ScaledDotProductAttention MultiHeadAttention
ScaledDotProductAttention实现缩放点积注意力 :
- 输入:
- Q K V [batch_size, n_heads, len_q/k/v, dim_q=k/v] (为了实现点积,需约束 dim_q=dim_k)
- attn_mask [batch_size, n_heads, len_q, len_k](跟 scores/weights 相同,用于忽略注意力分数) attn_mask
- 输出:
- 上下文向量(context): [batch_size, n_heads, len_q, dim_v]
- 注意力分数(weights): [batch_size, n_heads, len_q, len_k]
MultiHeadAttention则定义了 QKV,同时实现了多个子空间调用ScaledDotProductAttention的效果。
每个子层都遵循:Sublayer(x) → 层归一化(x + Sublayer(x))
6. Transformer-Decoder
解码器也是由 N 个相同结构的层堆叠而成(原论文 N=6),每个层包含三个主要步骤:
- (掩码多头自注意力 → 残差连接 & 层归一化)
- 掩码:同时使用填充掩码(Padding Mask)和因果掩码(Causal Mask)
- 输入:解码器输入序列的词向量与位置编码的融合表示。
- 输出:融合历史上下文信息的隐藏表示。
- (多头 Cross-Attention(交叉注意力) → 残差连接 & 层归一化)
- 原则:利用编码器输出的信息辅助当前 token 的生成。
- 掩码:仅使用编码器填充掩码(Encoder Padding Mask)
- 输入:
- Query 来自步骤1的输出;
- Key、Value 来自编码器最终输出。
- 输出:融合源序列信息后的隐藏表示。
- (前馈神经网络 FFN → 残差连接 & 层归一化)
- 作用:通 Encoder
- 输入:经过交叉注意力后的隐藏表示
- 输出:当前解码器层的最终表示,传递给下一解码器层
在自注意里层,相比 Transformer-Encoder,这里多了 Causal Mask,主要是因为解码器采用自回归生成方式,每个位置只能看到当前位置及之前的位置,不能看到未来 token。
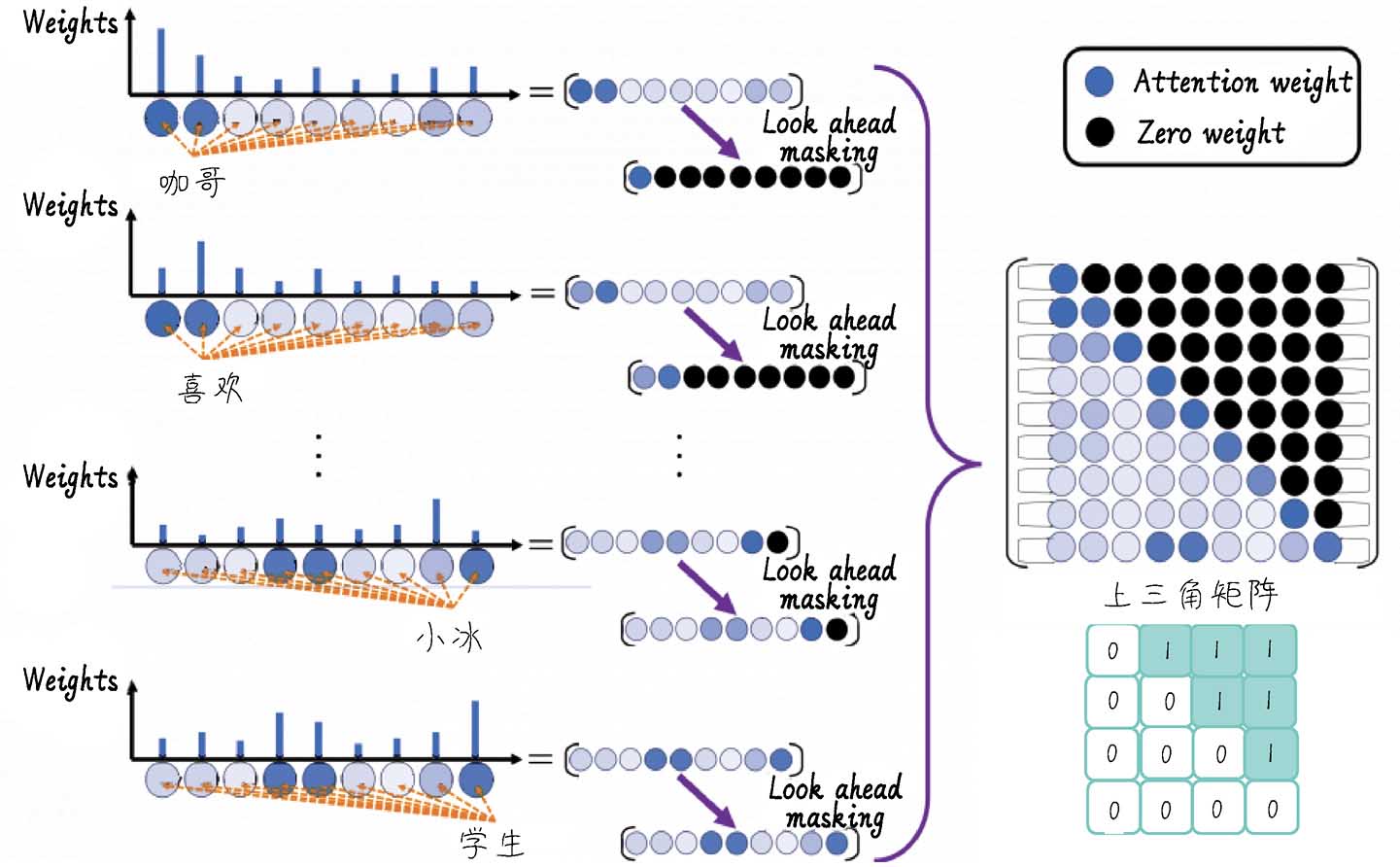
书里的图片比较复杂,我理解其实就是一个矩阵,比如原始 dec_inputs 大小是(T),这里就是生成了一个(T, T)的矩阵(流程图里的dec_self_attn_mask),对 dec_inputs 的第 i 个 token,按照矩阵第 i 行的数据遮挡,例如:
K:
<sos> I love you <eos>
Q <sos> ✓ × × × ×
Q I ✓ ✓ × × ×
Q love ✓ ✓ ✓ × ×
Q you ✓ ✓ ✓ ✓ ×
Q <eos> ✓ ✓ ✓ ✓ ✓
梳理 Decoder 流程图及形状变化:
flowchart TD
%% ===================== ENCODER OUTPUT =====================
N["enc_outputs<br/>(B, S, D)<br/>Final Encoder Output"]
%% ===================== DECODER INPUT =====================
A["dec_inputs<br/>(B, T)<br/>Token ID"]
A
-- "nn.Embedding" -->
B["target_embedding<br/>(B, T, D)"]
A
-- "Position Index 1...T" -->
C["pos_indices<br/>(1, T)"]
C
-- "Sin/Cos Position Embedding" -->
D["position_embedding<br/>(1, T, D)"]
B --> E["Embedding Fusion<br/>(B, T, D)"]
D --> E
%% ===================== MASK =====================
A
-- "get_subsequent_mask()" -->
F["causal_mask<br/>(T, T)"]
A
-- "get_attn_pad_mask()" -->
G["dec_self_attn_mask<br/>(B, T, T)"]
%% ===================== DECODER STACK =====================
subgraph Decoder Layers [Decoder Layer × N]
H["Layer Input<br/>(B, T, D)"]
%% -------- masked self attention --------
H
--> I["Masked Multi-Head Self-Attention<br/>Q=K=V=Decoder Input"]
G --> I
F --> I
I
--> J["Add & Norm"]
%% -------- cross attention --------
J
--> K["Cross-Attention<br/>Q=Decoder<br/>K=V=Encoder"]
N --> K
K
--> L["Add & Norm"]
%% -------- FFN --------
L
--> M["Position-wise FFN<br/>D → d_ff → D"]
M
--> O["Add & Norm"]
O
--> P["Layer Output<br/>(B, T, D)"]
end
E --> H
P --> Q["dec_outputs<br/>(B, T, D)<br/>Final Decoder Output"]
%% ===================== ATTENTION OUTPUTS =====================
I -. "self_attn_weights" .-> S1["Decoder Self-Attn Weights"]
K -. "cross_attn_weights" .-> S2["Cross-Attn Weights"]
7. Transformer
Transformer 就是将 Encoder Decoder 结合起来:
flowchart TD
A["enc_inputs (B, S)"]
B["dec_inputs (B, T)"]
A --> C["Encoder Layers (N × EncoderLayer)"]
C --> D["enc_outputs (B, S, D)"]
B --> E["Decoder Layers (N × DecoderLayer)"]
D --> E
E --> F["dec_outputs (B, T, D)"]
F --> G["Linear + Softmax"]
G --> H["Output (B, T, V)"]
Encoder Decoder 有很多相似之处,例如都是分层、都有掩码、注意力等,对比下区别:
| 对比维度 | 编码器 | 解码器 |
|---|---|---|
| 核心步骤 | 2步(自注意力 + FFN) | 3步(自注意力 + 交叉注意力 + FFN) |
| 掩码类型 | 仅填充掩码(Padding Mask) | 填充掩码 + 因果掩码(Causal Mask) |
| 交互对象 | 只和自身输入交互 | 自身输入 + 编码器输出(交叉注意力读编码器) |
| 核心目标 | 深度理解整个源序列 | 生成目标序列,同时对齐源序列 |
注意编码器和解码器都有自注意力(Self-Attention),解码器额外包含交叉注意力(Cross-Attention)。这些注意力层通常都采用多头注意力(Multi-Head Attention)实现。
其中各个注意力层用到的掩码有:
- 编码器-多头自注意力(Encoder Self-Attention)
- Padding Mask: 用于遮挡编码器输入中的无意义 padding 位, 因为 Encoder 可以看到整个输入序列,所以不需要 Causal Mask。形状:
[B,S,S]
- Padding Mask: 用于遮挡编码器输入中的无意义 padding 位, 因为 Encoder 可以看到整个输入序列,所以不需要 Causal Mask。形状:
- 解码器-多头自注意力(Decoder Self-Attention)
- Padding Mask: 用于遮挡解码器输入中的 padding 位。形状:
[B,T,T] - Causal Mask: 用于遮挡当前位置之后的 token,防止解码器看到未来信息。形状:
[B,T,T] - 实际参与计算的是两者合并后的 Mask:
M = M_padding | M_causal
- Padding Mask: 用于遮挡解码器输入中的 padding 位。形状:
- 解码器-编码器交叉注意力(Cross-Attention)
- Encoder Padding Mask: Query(Q) 来自解码器,Key(K)、Value(V) 来自编码器输出。用于遮挡编码器侧的 padding 位。不涉及 Causal Mask,因为编码器序列是完整可见的。Mask 的作用,对于每个 Decoder Query,决定哪些 Encoder Key 可以被访问,所以形状:
[B,T,S](dim-2:T 表示 Decoder Query 数量, dim-3: S 表示 Encoder Key 数量,因此可以支持每个 Query,读取需要屏蔽哪些 Encoder Key)
- Encoder Padding Mask: Query(Q) 来自解码器,Key(K)、Value(V) 来自编码器输出。用于遮挡编码器侧的 padding 位。不涉及 Causal Mask,因为编码器序列是完整可见的。Mask 的作用,对于每个 Decoder Query,决定哪些 Encoder Key 可以被访问,所以形状:
因此粗略可以得出:Decoder = Encoder + Cross-Attention + Causal Mask