整体上,zookeeper提供的C API可以分为三种:
- 辅助接口:例如连接的初始化和销毁,状态的获取等
- 同步接口:同步操作znode,zoo_xxx/zoo_wxxx的形式,例如创建(zoo_create),查看节点data(zoo_get/zoo_wget)等
- 异步接口:异步操作znode,zoo_axxx的形式,例如创建(zoo_acreate),查看节点data(zoo_aget)等
在接口设计上zookeeper非常灵活,例如查看znode是否存在,提供了接口zoo_exists/zoo_wexists/zoo_aexists/zoo_awexists,由应用方按照具体场景选择使用。
为了避免只是单纯的翻译介绍zookeeper.h,本文主要从整体上介绍这些接口的异同点,并提供了一些仅供学习环境的例子,以及总结的注意事项。zookeeper客户端代码遵守doxy规范,使用doxygen可以得到一份详细的接口文档,强烈建议读一遍文档。
我们从如何创建和销毁跟服务集群的连接开始,逐步介绍zookeeper客户端的接口使用。
1. 连接的创建和销毁
在使用ZooKeeper进行任何操作之前,需要一个zhandle_t句柄,用于管理客户端与服务器之间的连接,所有的zookeeper接口函数都需要传入该参数。通过zookeeper.h的两个接口进行创建和销毁:
ZOOAPI zhandle_t *zookeeper_init(const char *host, watcher_fn fn,
int recv_timeout, const clientid_t *clientid, void *context, int flags);
ZOOAPI int zookeeper_close(zhandle_t *zh);
zookeeper_init初始化一条与服务器之间的连接。
各个参数的含义:
- host: 服务集群主机地址的字符串,地址格式为host:port,每组地址以逗号分隔。
- fn:回调函数地址,如果设置了监视点,znode节点发生相关变化后,该回调函数会被调用。
- recv_timeout:会话过期时间,单位毫秒。
- clientid:之前已建立的一个会话的客户端ID,用于客户端重新连接。在建立会话时,通过调用
zoo_client_id来获取客户端ID。指定参数0开始新的会话。 - context:传入一个上下文对象,在回调函数
fn中使用,也可以通过`zoo。 - flags:暂时未使用,设置为0.
回调函数声明如下:
typedef void (*watcher_fn)(zhandle_t *zh, int type,
int state, const char *path,void *watcherCtx);
注意连接的创建是异步的,也就是当zookeeper_init返回时连接并不一定建立,只有在fn回调函数调用时返回state = ZOO_CONNECTED_STATE时才连接成功。
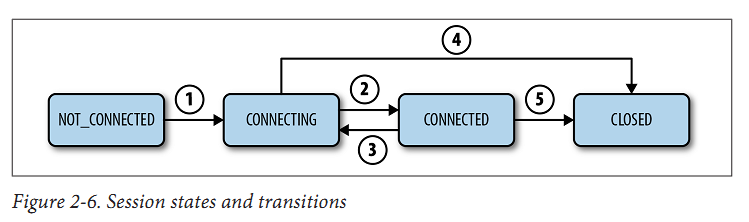
一个会话的生命周期是指会话从创建到结束的时期,中间可能的状态有:CONNECTED CONNECTING CLOSED NOT_CONNECTED。
一个会话从NOT_CONNECTED开始,当ZooKeeper客户端初始化后转换到CONNECTING。成功建立连接后状态为CONNECTED,关闭连接后状态为CLOSED。中间可能断开连接状态变为CONNECTING。
状态以及可能状态的转换如下图:
zookeeper_close比较简单,用于释放已经申请的资源。
看一个简单的例子,在这个例子里我们连接zk服务集群,并在连接成功后断开。
#include <assert.h>
#include <pthread.h>
#include <string>
#include <iostream>
#include "zookeeper.h"
const std::string server = "127.0.0.1:2181";
const std::string root_path = "/";
const int32_t session_timeout_ms = 15000;
volatile bool connected = false;
pthread_mutex_t lock = PTHREAD_MUTEX_INITIALIZER;
pthread_cond_t cond = PTHREAD_COND_INITIALIZER;
//连接后发送连接成功的signal
void signal_on_request_finished() {
pthread_mutex_lock(&lock);
connected = true;
pthread_cond_signal(&cond);
pthread_mutex_unlock(&lock);
}
//等待连接成功
void wait_until_connected() {
pthread_mutex_lock(&lock);
while (!connected) {
pthread_cond_wait(&cond, &lock);
}
pthread_mutex_unlock(&lock);
}
//处理事件的监视点函数
void zk_event_callback(
zhandle_t* zh,
int type,
int state,
const char* path,
void* watcherCtx) {
std::cout << __PRETTY_FUNCTION__ << std::endl;
std::cout << "zh:" << zh << std::endl;
std::cout << "type:" << type << std::endl;
std::cout << "state:" << state << std::endl;
std::cout << "path:" << path << std::endl;
std::string* context = static_cast<std::string*>(watcherCtx);
std::cout << "watcherCtx:" << *context << std::endl;
delete context;
signal_on_request_finished();
}
zhandle_t *init_zhandle() {
std::cout << __PRETTY_FUNCTION__ << std::endl;
std::string* str = new std::string(__PRETTY_FUNCTION__);
return zookeeper_init(
(server + root_path).c_str(),
zk_event_callback,
15000,
NULL,
str,
0);
}
void close_zhandle(zhandle_t*& handle) {
std::cout << __PRETTY_FUNCTION__ << std::endl;
int res = zookeeper_close(handle);
std::cout << res << "\t" << zerror(res) << std::endl;
handle = NULL;
}
int main() {
zhandle_t *handle = init_zhandle();//连接zk服务端
assert(handle != NULL);
wait_until_connected();//等待连接成功
close_zhandle(handle);//关闭连接,释放资源
return 0;
}
程序调用zookeeper_init后等待zk_event_callback回调函数连接成功,然后调用zookeeper_close关闭连接。
分析下程序的输出:
zhandle_t* init_zhandle()
2016-10-02 23:03:40,844:5470(0x7f6957f39740):ZOO_INFO@log_env@674: Client environment:zookeeper.version=zookeeper C client 3.3.3.900
2016-10-02 23:03:40,844:5470(0x7f6957f39740):ZOO_INFO@log_env@678: Client environment:host.name=******
2016-10-02 23:03:40,844:5470(0x7f6957f39740):ZOO_INFO@log_env@685: Client environment:os.name=Linux
2016-10-02 23:03:40,844:5470(0x7f6957f39740):ZOO_INFO@log_env@686: Client environment:os.arch=2.6.32_1-17-0-0
2016-10-02 23:03:40,844:5470(0x7f6957f39740):ZOO_INFO@log_env@687: Client environment:os.version=#1 SMP Mon Aug 24 11:14:27 CST 2015
2016-10-02 23:03:40,844:5470(0x7f6957f39740):ZOO_INFO@log_env@695: Client environment:user.name=******
2016-10-02 23:03:40,844:5470(0x7f6957f39740):ZOO_INFO@log_env@703: Client environment:user.home=******
2016-10-02 23:03:40,844:5470(0x7f6957f39740):ZOO_INFO@log_env@715: Client environment:user.dir=******
2016-10-02 23:03:40,844:5470(0x7f6957f39740):ZOO_INFO@zookeeper_init@743: Initiating client connection, host=127.0.0.1:2181/ sessionTimeout=15000 watcher=0x402dfd sessionId=0 sessionPasswd=<null> context=0x617080 flags=0
2016-10-02 23:03:40,846:5470(0x7f695653a700):ZOO_INFO@check_events@1710: initiated connection to server [127.0.0.1:2181]
2016-10-02 23:03:40,851:5470(0x7f695653a700):ZOO_INFO@check_events@1757: session establishment complete on server [127.0.0.1:2181], sessionId=0x1575ceca89a0025, negotiated timeout=15000
void zk_event_callback(zhandle_t*, int, int, const char*, void*)
zh:0x619570
type:-1
state:3
path:
watcherCtx:zhandle_t* init_zhandle()
void close_zhandle(zhandle_t*&)
2016-10-02 23:03:40,851:5470(0x7f6957f39740):ZOO_INFO@zookeeper_close@2440: Closing zookeeper sessionId=0x1575ceca89a0025 to [127.0.0.1:2181]
0 ok
zookeeper客户端会输出部分日志,这里重点看下程序自身的输出:
zk_event_callback里,type = -1; state = 3都是常量定义,分别为ZOO_SESSION_EVENT; ZOO_CONNECTED_STATE,此时表示连接确实建立。同时zookeeper_close是有返回值的,这里的值是0,我们使用zerror打印出了对应的字符串解释为”ok”。
因此,接下来我们先介绍下type,state,返回值等常见的常量, 以及监视点函数,也就是我们的全局回调函数。
2. 监视点函数、常量定义
监视点函数的定义如下:
typedef void (*watcher_fn)(zhandle_t *zh, int type,
int state, const char *path,void *watcherCtx);
各参数说明:
- 监视点函数引用的ZooKeeper句柄
- 事件类型,比如上面连接成功type=-1,对应ZOO_SESSION_EVENT
- 连接状态,比如上面连接成功state=3,对应ZOO_CONNECTED_STATE
- 被观察并触发时间的znode节点路径,如果时间为会话事件,路径为NULL
- 监视点上下文
参数type相关的数值有:
ZOO_CREATED_EVENT:1
ZOO_DELETED_EVENT:2
ZOO_CHANGED_EVENT:3
ZOO_CHILD_EVENT:4
ZOO_SESSION_EVENT:-1
ZOO_NOTWATCHING_EVENT:-2
参数state相关的数值有:
ZOO_EXPIRED_SESSION_STATE:-112
ZOO_AUTH_FAILED_STATE:-113
ZOO_CONNECTING_STATE:1
ZOO_ASSOCIATING_STATE:2
ZOO_CONNECTED_STATE:3
返回值为ZOO_ERRORS连接的enum常量,常用的有ZOK ZSYSTEMERROR ZRUNTIMEINCONSISTENCY等,使用ZOOAPI const char* zerror(int c)可以转化成对应的字符串解释。
其他一些ACL常量、create flags等常量,我们在相关的API里根据具体使用环境介绍。
接下来我们介绍znode操作的同步接口,同步接口又可以分为两类,分别是zoo_xxx和zoo_wxxx的形式,例如:
ZOOAPI int zoo_exists(zhandle_t *zh, const char *path, int watch, struct Stat *stat);
ZOOAPI int zoo_wexists(zhandle_t *zh, const char *path,
watcher_fn watcher, void* watcherCtx, struct Stat *stat);
两者作用相同:都是通过传入zh来监控path这个znode,返回值表示是否存在或者其他错误。区别是在监视点的注册上,传入”watch flag”还是”watcher object”,这两个名词是zookeeper的术语,简言之就是传入一个int值,还是回调函数watcher+上下文watcherCtx来监视path,如果传入前者,则在path被创建时回调zookeeper_init里的回调函数,如果传入后者,则后者被回调。
也就是说watch_fn在两种情况下作为参数指定:zookeeper_init和zoo_wxxx类型的函数。
类似的接口还有zoo_get/zoo_wget zoo_get_children/zoo_wget_children zoo_get_children2/zoo_wget_children2
我们使用zoo_exists/zoo_wexists的例子来具体看下两种回调方式的区别。
3. 监视点回调的例子
...
void zk_event_callback(
zhandle_t* zh,
int type,
int state,
const char* path,
void* watcherCtx) {
std::cout << __PRETTY_FUNCTION__ << std::endl;
std::cout << "zh:" << zh << std::endl;
std::cout << "type:" << type << std::endl;
std::cout << "state:" << state << std::endl;
std::cout << "path:" << path << std::endl;
std::cout << "watcherCtx:" << watcherCtx << std::endl;
std::string* context = static_cast<std::string*>(watcherCtx);
std::cout << "watcherCtx:" << *context << std::endl;
signal_on_request_finished();
}
void watch_event_callback(
zhandle_t* zh,
int type,
int state,
const char* path,
void* watcherCtx) {
std::cout << __PRETTY_FUNCTION__ << std::endl;
std::cout << "zh:" << zh << std::endl;
std::cout << "type:" << type << std::endl;
std::cout << "state:" << state << std::endl;
std::cout << "path:" << path << std::endl;
std::cout << "watcherCtx:" << watcherCtx << std::endl;
std::string* context = static_cast<std::string*>(watcherCtx);
std::cout << "watcherCtx:" << *context << std::endl;
signal_on_request_finished();
}
zhandle_t *init_zhandle() {
std::cout << __PRETTY_FUNCTION__ << std::endl;
std::string* str = new std::string(__PRETTY_FUNCTION__);//memory leak, use shared_ptr instead
return zookeeper_init(
(server + root_path).c_str(),
zk_event_callback,
15000,
NULL,
str,
0);
}
void close_zhandle(zhandle_t*& handle) {
std::cout << __PRETTY_FUNCTION__ << std::endl;
int res = zookeeper_close(handle);
std::cout << res << "\t" << zerror(res) << std::endl;
handle = NULL;
}
void wexists(zhandle_t* zh, const char* path) {
std::cout << __PRETTY_FUNCTION__ << std::endl;
std::string* str = new std::string(__PRETTY_FUNCTION__);//memory leak, use shared_ptr instead
int res = zoo_wexists(zh, path, watch_event_callback, str, NULL);
std::cout << "res[" << res << "]:"<< zerror(res) << std::endl;
}
void exists(zhandle_t* zh, const char* path) {
std::cout << __PRETTY_FUNCTION__ << std::endl;
std::string* str = new std::string(__PRETTY_FUNCTION__);//memory leak, use shared_ptr instead
zoo_set_context(zh, str);
int res = zoo_exists(zh, path, 1, NULL);
std::cout << "res[" << res << "]:"<< zerror(res) << std::endl;
}
void create(zhandle_t* zh, const char* path) {
std::cout << __PRETTY_FUNCTION__ << std::endl;
std::string data = "data_by_API_zoo_create";
char buffer[64] = {0};
int res = zoo_create(zh, path, data.c_str(), data.size(),
// &ZOO_OPEN_ACL_UNSAFE, ZOO_SEQUENCE, buffer, sizeof(buffer));
&ZOO_OPEN_ACL_UNSAFE, ZOO_EPHEMERAL, buffer, sizeof(buffer));
// &ZOO_OPEN_ACL_UNSAFE, 0, buffer, sizeof(buffer));
std::cout << "res[" << res << "]:"<< zerror(res) << std::endl;
std::cout << buffer << std::endl;
}
int main() {
zhandle_t *handle = init_zhandle();
assert(handle != NULL);
wait_until_connected();
wexists(handle, "/ephemerals_node");//使用zoo_wexists检查是否存在
exists(handle, "/ephemerals_node");//使用zoo_exists检查是否存在
create(handle, "/ephemerals_node");//创建znode
sleep(10);
close_zhandle(handle);
return 0;
}
部分代码与上个例子相同,因此做了删减。注意例子里context会有内存泄露的问题。
程序先使用两种同步方式检测/ephemerals_node这个znode是否存在,并注册监视点,接着创建这个结点,sleep等待回调函数被调用(真实场景里永远不建议使用sleep实现同步效果)。
从程序的输出看下zoo_exist/zoo_wexists的不同(过滤了zookeeper自身的输出并做了注释):
zhandle_t* init_zhandle()//初始化连接
void zk_event_callback(zhandle_t*, int, int, const char*, void*)//连接成功回调
zh:0x619570
type:-1//ZOO_SESSION_EVENT
state:3//ZOO_CONNECTED_STATE
path://连接成功回调,没有监视path,因此为NULL
watcherCtx:0x617080
watcherCtx:zhandle_t* init_zhandle()//上下文
void wexists(zhandle_t*, const char*)//zoo_wexists注册watch_event_callback回调
res[-101]:no node//ZNONODE
void exists(zhandle_t*, const char*)//zoo_exists通过传入watch flag = 1注册回调
res[-101]:no node//ZNONODE
void create(zhandle_t*, const char*)//创建节点
void watch_event_callback(zhandle_t*, int, int, const char*, void*)//创建后触发zoo_wexists回调
zh:0x619570
type:1//ZOO_CREATED_EVENT
state:3//ZOO_CONNECTED_STATE
path:/ephemerals_node //监视path
watcherCtx:0x61a960
watcherCtx:void wexists(zhandle_t*, const char*)//上下文
void zk_event_callback(zhandle_t*, int, int, const char*, void*)//创建后触发zoo_exists回调
zh:0x619570
type:1//ZOO_CREATED_EVENT
state:3//ZOO_CONNECTED_STATE
path:/ephemerals_node //监视path
watcherCtx:0x61ab90
watcherCtx:void exists(zhandle_t*, const char*) //上下文
res[0]:ok //ZOK
/ephemerals_node
void close_zhandle(zhandle_t*&)
0 ok //ZOK
我们使用zoo_exists/zoo_wexists创建了两个监视点,zoo_create创建znode后,触发了两次回调,分别为watch_event_callback zk_event_callback。可以看到两个回调函数的context互不影响。
4. 写
上面的例子里,我们使用zoo_create创建了一个临时znode,函数原型如下:
ZOOAPI int zoo_create(zhandle_t *zh, const char *path, const char *value,
int valuelen, const struct ACL_vector *acl, int flags,
char *path_buffer, int path_buffer_len);
ACL与权限管理有关,上个例子里不设置权限,因此取值为ZOO_OPEN_ACL_UNSAFE,ACL_vector初始化操作定义在zookeeper.jute.h。
之前我们介绍过znode一共有四种类型,其中参数flags用于指定类型:ZOO_EPHEMERAL, ZOO_SEQUENCE, 0,因为对sequence类型,创建的真实path在服务器端确定,参数path_buffer记录了真实的path。
创建后我们可以使用zoo_set/zoo_set2接口进行数据的更新
ZOOAPI int zoo_set(zhandle_t *zh, const char *path, const char *buffer,
int buflen, int version);
ZOOAPI int zoo_set2(zhandle_t *zh, const char *path, const char *buffer,
int buflen, int version, struct Stat *stat);
参数version用于多个进程对同一znode数据的更新控制,只有传入的参数version与服务器端一致时,才会更新成功。
5. 读
读znode主要有三个接口:
zoo_exists/zoo_wexists查看znode存在与否
zoo_get/zoo_wget获取znode对应data
zoo_get_children/zoo_wget_children获取子节点的信息
各个接口的参数不再一一在本文赘述,注意一些参数初始化/销毁相关的操作在zookeeper.jute.h中定义。
6. 异步接口
异步接口跟同步类似,只是函数立刻返回,对znode的操作结果在异步函数里完成。例如zoo_acreate定义如下:
ZOOAPI int zoo_acreate(zhandle_t *zh, const char *path, const char *value,
int valuelen, const struct ACL_vector *acl, int flags,
string_completion_t completion, const void *data);
可以看到跟zoo_create最大的区别是多了一个异步结果处理函数以及对应的上下文。
其中string_completion_t的定义如下
typedef void
(*string_completion_t)(int rc, const char *value, const void *data);
rc为处理结果返回值,value为实际的path,data为zoo_acreate里传递的上下文对象,创建成功后该函数会被调用。
其他几个异步结果处理函数有:
typedef void (*void_completion_t)(int rc, const void *data);
typedef void (*stat_completion_t)(int rc, const struct Stat *stat,
const void *data);
typedef void (*data_completion_t)(int rc, const char *value, int value_len,
const struct Stat *stat, const void *data);
typedef void (*strings_completion_t)(int rc,
const struct String_vector *strings, const void *data);
typedef void (*strings_stat_completion_t)(int rc,
const struct String_vector *strings, const struct Stat *stat,
const void *data);
typedef void
(*string_completion_t)(int rc, const char *value, const void *data);
typedef void (*acl_completion_t)(int rc, struct ACL_vector *acl,
struct Stat *stat, const void *data);
7. 实战
之前介绍过使用zlcli模拟一个主-从实例,如果需要查看对应的master c代码,可以参考fpj大神的的github。
8. 注意
各个接口的用法建议在使用时直接参考zookeeper.h,因此本文没有逐个接口细细展开介绍,这里说明几个注意点:
- zk的回调方式为单次回调,如果需要继续关注,需要在回调函数里再次注册监视点。
- 与zkcli相同,创建节点无法自动递归创建,需要手动创建。
- 监视点设置后无法手动移除。
zookeeper_interest接口用于单线程版本里,在多线程环境下不建议使用。- 单次触发会丢失事件,但是可以保证不丢任务。
- java中提供了
multitop的调用方式保证多个操作的原子性,c提供了zoo_multi。